February 2016
8
C
over
S
tory
Low power levels plus advances in semicon-
ductor fabrication now allow a complete
radar transceiver to be formed with only a
few devices. A typical radar module consists
of a transmitter, voltage-controlled oscillator
(VCO), and receiver ICs, along with a micro-
controller unit (MCU). The chips are con-
nected via a local oscillator operating at about
38GHz. Together these devices can provide a
complete radar solution for adaptive cruise
control, emergency braking, lane departure
warning and blind-spot detection systems
that consume power efficiently.
The list of specific auto safety functions, each
with its own acronym, that require some
type of sensor or sensors is long and growing,
which makes sorting them out confusing at
best. Collectively they’re grouped under the
term Advanced Driver Assistance Systems
(ADAS) that includes everything from col-
lision avoidance to lane departure and blind
spot warning, and backup cameras to systems
designed to detect the awareness of the driver
(or lack thereof), to name only a few. Some
types merely detect impending doom but
others are designed to prevent it, much like
some systems used in commercial aviation.
Ironically, as auto safety systems increasingly
rely on radar, the next generation of aviation
safety systems will not, using satellite naviga-
tion instead. One by one, many auto safety
functions will become mandatory in vehicles
as their performance and value is demon-
strated. For example, the National High-
way Traffic Safety Administration (NHTSA)
recently ruled that all vehicles weighing less
than 5 tons and built after May 2018 must
have backup cameras. Progress in this area
will be simultaneous with development of
autonomous vehicles that will rely on all sorts
of sensor-based systems to provide situational
awareness, collision avoidance, and many
other functions.
One of the least developed but critical ele-
ments necessary to make autonomous vehi-
cles a reality is their ability to communicate
with other vehicles and to networks such as
Wi-Fi and cellular systems. No type of sensor,
RF or optical, has the range or field of view
needed to locate the car you’re riding in from
ten cars ahead or behind, so vehicle-to-vehi-
cle (V2V) and vehicle-to-infrastructure (V2I)
systems will be essential to achieving true
autonomy. In a V2V system, two or more
vehicles that are within acceptable commu-
nication range automatically establish a con-
nection to form an ad-hoc network. They can
then transmit and receive data about their
location, speed, and direction. As this type
of network allows all participants to act as
routers, they can connect with other vehicles
further away. The overall system must be able
to make rapid decisions automatically so that
timely warnings can be created and sent.
V2I expands the range and type of data that
can be included to decision-making purposes
by incorporating a broad array of infrastruc-
ture into the mix, gathering data about traf-
fic and road conditions and recommending
specific actions that vehicles in specific areas
should take. This can presumably also reduce
emissions and fuel consumption. These rec-
ommendations could be offered to drivers via
their information panels or by external signs
or both. In an ideal scenario, these sugges-
tions would turn into actions taken not by the
driver but by the car, up to a point defined by
the Vienna Convention on Road Traffic.
V2V systems have been designated to operate
between 5.85 and 5.925GHz, which was set
aside by Congress for this purpose and has
been harmonized with the EU and elsewhere.
Although various communication standards
have been proposed, the most likely will be an
IEEE 802.11 variant called IEEE 802.11p that
is designed to meet the criteria of Intelligent
Transportation Systems (ITS). In particular,
since a moving vehicle and roadside infra-
structure may be able to communicate for a
very short time, IEEE 802.11p makes it possi-
ble to exchange data without first being authen-
ticated. Rather, transmission and reception
can begin as soon as they are detected. As this
varies from standard IEEE 802.11 protocol,
the new “p” variant was required. The variant
is part of IEEE 1609 Family of Standards for
Wireless Access in Vehicular Environments
(WAVE), which defines the architecture, com-
munications model, management structure,
security mechanisms, and physical access for
low-latency communication up to 27Mb/s
over ranges up to 1000m.
Every vehicle manufacturer is actively work-
ing to bring V2V to fruition and numerous
consortia have been created to ensure prog-
ress in a more or less coherent way. Toyota,
for one, has committed to having some of its
models V2I-enabled as an option this year in
Japan, compatible with advanced vehicle-in-
frastructure cooperative systems that operate
at the Intelligent Transportation System (ITS)
frequency. While industry-wide compatible
systems may seem a long way away, the inten-
sive development taking place in this industry
along with efforts by NHTSA, the Depart-
ment of Transportation, and similar agencies
throughout the world to create a set of stan-
dards are shrinking this timeline. In fact, it is
possible that manufacturers may be required
to deploy V2V systems in the U.S. by 2017.
NHTSA has stated that it believes this technol-
ogy could reduce accidents by as much as 80%.
The scope of the ITS is ambitious, considering
all of the data, cars, infrastructure, and new
technology involved. However, the techno-
logical sophistication of modern vehicles is
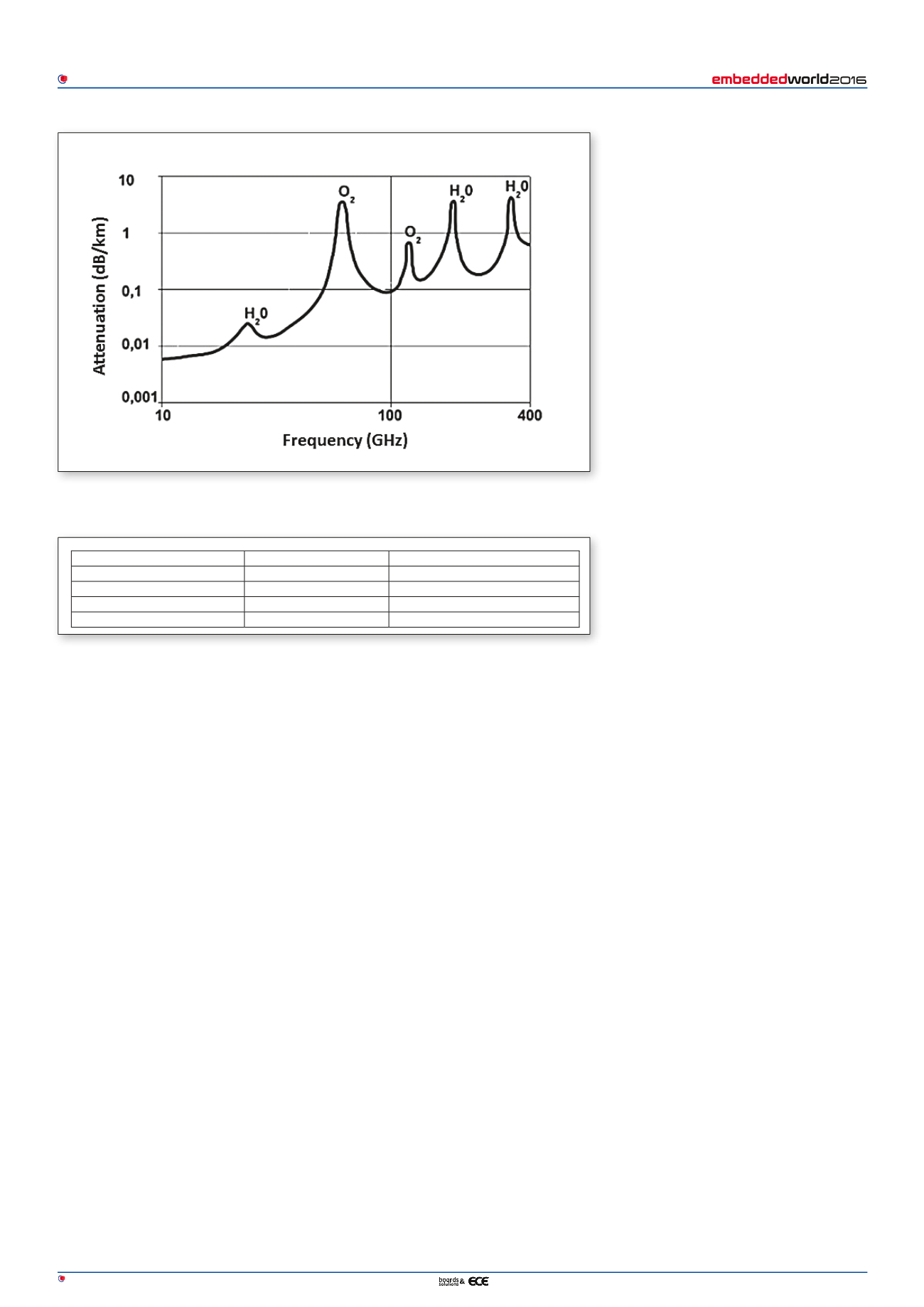
Figure 2. Attenuation dips between about 70 and 100GHz, increasing achievable communication
range.
(Source:
/ File:Micrwavattrp.png)
Application
Detection range (m)
Operating frequency (GHz)
Adaptive cruise control
200
77
Pre-crash
30
24, 76, 77, 81
Blind spot detection
20
24
Stop and go
30
24, 76, 77, 81
Table 1. Vehicular radar applications and operating frequencies


